前言
在之前学习 Android 图形渲染的时候, 我们看到了最终所有的渲染数据都会通过 Surface 推送给 SurfaceFlinger, 然后在 SurfaceFlinger 进程中真正的进行渲染
这里我们学习一下 SurfaceFlinger 进程的启动流程
SurfaceFlinger 的启动
在系统启动篇, 我们知道 SurfaceFlinger 是由 init 进程 fork 出来的, 它的启动脚本定义如下
// frameworks/native/services/surfaceflinger/surfaceflinger.rc
service surfaceflinger /system/bin/surfaceflinger
class core animation
user system
group graphics drmrpc readproc
onrestart restart zygote
writepid /dev/stune/foreground/tasks
socket pdx/system/vr/display/client stream 0666 system graphics u:object_r:pdx_display_client_endpoint_socket:s0
socket pdx/system/vr/display/manager stream 0666 system graphics u:object_r:pdx_display_manager_endpoint_socket:s0
socket pdx/system/vr/display/vsync stream 0666 system graphics u:object_r:pdx_display_vsync_endpoint_socket:s0
当 SurfaceFlinger 被 fork 出来后, 会调用 main_surfaceflinger.cpp 的 main 方法, 接下来看看它的启动
// frameworks/native/services/surfaceflinger/main_surfaceflinger.cpp
int main(int, char**) {
......
// 配置 Binder 驱动相关数据
// 设置 Binder 线程池的数量为 4
ProcessState::self()->setThreadPoolMaxThreadCount(4);
// 启动 Binder 线程池
sp<ProcessState> ps(ProcessState::self());
ps->startThreadPool();
// 1. 创建 SurfaceFlinger
sp<SurfaceFlinger> flinger = new SurfaceFlinger();
setpriority(PRIO_PROCESS, 0, PRIORITY_URGENT_DISPLAY);
set_sched_policy(0, SP_FOREGROUND);
......
// 2. 初始化 SurfaceFlinger
flinger->init();
// 3. 将 SurfaceFlinger 发布到 ServiceManager 中, 方便其他进程与之建立连接
sp<IServiceManager> sm(defaultServiceManager());
sm->addService(String16(SurfaceFlinger::getServiceName()), flinger, false,
IServiceManager::DUMP_FLAG_PRIORITY_CRITICAL);
......
// 4. 启动 SurfaceFlinger
flinger->run();
return 0;
}
从这里可以看出 SurfaceFlinger 启动的主要流程为如下 4 个步骤
- SurfaceFlinger 的创建
- SurfaceFlinger 的初始化
- SurfaceFlinger 的发布
- 将这个 Binder 本地对象发布到 ServiceManager 进程
- SurfaceFlinger 的启动
其中, 将 SurfaceFlinger Binder 本地对象发布到 ServiceManager 这里就不再赘述了, 我们主要关心一下其他三个方面
一. SurfaceFlinger 的创建
// frameworks/native/services/surfaceflinger/SurfaceFlinger.h
class SurfaceFlinger : public BnSurfaceComposer,
public PriorityDumper,
private IBinder::DeathRecipient,
private HWC2::ComposerCallback
{
......
}
// frameworks/native/services/surfaceflinger/SurfaceFlinger.cpp
SurfaceFlinger::SurfaceFlinger() : SurfaceFlinger(SkipInitialization) {
......
}
SurfaceFlinger::SurfaceFlinger(SurfaceFlinger::SkipInitializationTag)
: BnSurfaceComposer(),
.......
// 创建 DispSync 对象
mPrimaryDispSync("PrimaryDispSync"),
....... {
// 初始化 DispSync 对象
mPrimaryDispSync.init(SurfaceFlinger::hasSyncFramework, SurfaceFlinger::dispSyncPresentTimeOffset);
}
从 SurfaceFlinger 的构造中我们了解到它是继承了 BnSurfaceComposer Binder 本地对象, 这也是为何它能够发布到 ServiceManager 的原因
在其构造方法中, 我们看到它创建并初始化了 DispSync mPrimaryDispSync 这个对象, DispSync 类似于一个 PLL(phase lock loop,锁相回路),它通过接收硬件 VSYNC,然后给其他关心硬件 VSYNC 的组件(SurfaceFlinger 和需要渲染的 app)在指定的偏移以后发送软件 VSYNC,并且当误差在可接受的范围内,将会关闭硬件 VSYNC
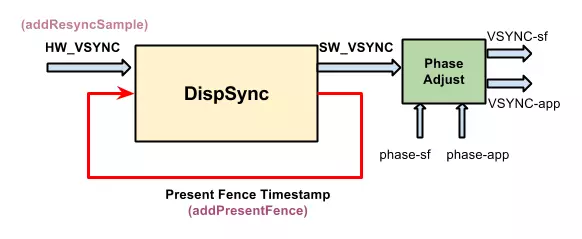
- HW-Vsync: 由硬件直接产生的垂直同步信号
- SW-Vsync: 由 DispSync 转移后的软件垂直同步信号
- SF-Vsync: 供 SurfaceFlinger 端使用的垂直同步信号
- APP-Vsync: 供 App 端 Choreographer 使用的垂直同步信号
也就是说 DispSync 主要是负责将硬件垂直同步信号转为软件垂直同步信号, 然后供上层使用
关于为何不直接使用硬件垂直同步信号, 笔者从这篇博文中找到了满意的答案 https://simowce.github.io/2019/10/07/all-about-dispsync/
- 在 Android 4.1 的时候,Google 提出了著名的 “Project Butter”,引入了 VSYNC, 把 app 画图,SurfaceFlinger 合成的时间点都规范了起来,减少了掉帧,增强了渲染的流畅度。
- 假设有这么一种需求,我希望在 VSYNC 偏移一段时间以后再干活,那么这个是硬件 VSYNC 提供不了,所以这个时候就必须引入软件模型。而 DispSync 就是为了解决这个需求引入的软件模型。
因此 DispSync 还是非常重要的, 下面我们看看 DispSync 的初始化操作
一) DispSync 的初始化
// frameworks/native/services/surfaceflinger/DispSync.cpp
DispSync::DispSync(const char* name)
: mName(name), mRefreshSkipCount(0), mThread(new DispSyncThread(name)) {}
void DispSync::init(bool hasSyncFramework, int64_t dispSyncPresentTimeOffset) {
......
// 调用了 mThread 的 run 方法
mThread->run("DispSync", PRIORITY_URGENT_DISPLAY + PRIORITY_MORE_FAVORABLE);
......
}
可以看到 DispSync 的构造函数中创建了一个 DispSyncThread 对象, 而后在其初始化时, 调用了这个线程的 run 方法, 我们继续探究
// frameworks/native/services/surfaceflinger/DispSync.cpp
class DispSyncThread : public Thread {
public:
explicit DispSyncThread(const char* name)
: mName(name),
mStop(false),
mPeriod(0),
mPhase(0),
mReferenceTime(0),
mWakeupLatency(0),
mFrameNumber(0) {}
可以看到, 这个 DispSyncThread 继承自 Thread 类, 这个 Thread 是 Native 层对 p_thread_t 的封装, 其操作方式与 Java 相似, 当调用 run 函数时, 会创建一个新的线程, 并且调用 threadLoop 函数
virtual bool threadLoop() {
status_t err;
nsecs_t now = systemTime(SYSTEM_TIME_MONOTONIC);
while (true) {
Vector<CallbackInvocation> callbackInvocations;
nsecs_t targetTime = 0;
{ // Scope for lock
// 若 mPeriod 为 0, 则循环等待
if (mPeriod == 0) {
err = mCond.wait(mMutex);
if (err != NO_ERROR) {
ALOGE("error waiting for new events: %s (%d)", strerror(-err), err);
return false;
}
continue;
}
......
// 收集 vsync 信号的所有回调方法
callbackInvocations = gatherCallbackInvocationsLocked(now);
}
if (callbackInvocations.size() > 0) {
// 回调所有对象的 onDispSyncEvent 方法
fireCallbackInvocations(callbackInvocations);
}
}
return false;
}
可以看到 threadLoop 中实现了一个死循环, 从循环的实现中可以得知, DispSyncThread 的职责是分发 sw-Vsync 信号的, 关于其循环内部的相关函数功能实现, 到后面的章节在具体分析
除此之外 SurfaceFlinger 是支持智能指针的, 当他第一次被引用的时候, 会回调 onFirstRef 方法, 下面看看 onFirstRef 中做了什么
二) onFirstRef
// frameworks/native/services/surfaceflinger/SurfaceFlinger.cpp
void SurfaceFlinger::onFirstRef()
{
// 初始化事件队列
mEventQueue->init(this);
}
// frameworks/native/services/surfaceflinger/MessageQueue.cpp
void MessageQueue::init(const sp<SurfaceFlinger>& flinger) {
mFlinger = flinger;
// 创建了一个 Looper
mLooper = new Looper(true);
// 创建了一个 Handler
mHandler = new Handler(*this);
}
可以看到 onFirstRef 的实现很简单, 即初始化了当前线程的 MessageQueue, 也就是说 SurfaceFlinger 中是存在与其他线程协作交互的, 这个我们到后面逐步的验证
接下来看看 SurfaceFlinger 的初始化操作
二. SurfaceFlinger 的初始化
// frameworks/native/services/surfaceflinger/SurfaceFlinger.cpp
// Do not call property_set on main thread which will be blocked by init
// Use StartPropertySetThread instead.
void SurfaceFlinger::init() {
......
Mutex::Autolock _l(mStateLock);
// 1. 创建 APP 端对 vsync 信号的处理线程
// DispSyncSource 为 DispSync 与 EventThread 沟通的桥梁
mEventThreadSource =
std::make_unique<DispSyncSource>(&mPrimaryDispSync, SurfaceFlinger::vsyncPhaseOffsetNs,
true, "app");
mEventThread = std::make_unique<impl::EventThread>(mEventThreadSource.get(),
[this]() { resyncWithRateLimit(); },
impl::EventThread::InterceptVSyncsCallback(),
"appEventThread");
// 2. 创建 SF 端对 vsync 信号的处理线程
mSfEventThreadSource =
std::make_unique<DispSyncSource>(&mPrimaryDispSync,
SurfaceFlinger::sfVsyncPhaseOffsetNs, true, "sf");
mSFEventThread =
std::make_unique<impl::EventThread>(mSfEventThreadSource.get(),
[this]() { resyncWithRateLimit(); },
[this](nsecs_t timestamp) {
mInterceptor->saveVSyncEvent(timestamp);
},
"sfEventThread");
// 3. 将 mSFEventThread 设置为处理 EventQueue 要监听的线程
mEventQueue->setEventThread(mSFEventThread.get());
// 初始化 GL 渲染引擎
getBE().mRenderEngine =
RE::impl::RenderEngine::create(HAL_PIXEL_FORMAT_RGBA_8888,
hasWideColorDisplay
? RE::RenderEngine::WIDE_COLOR_SUPPORT
: 0);
// 4. 初始化 HWComposer
getBE().mHwc.reset(
new HWComposer(std::make_unique<Hwc2::impl::Composer>(getBE().mHwcServiceName)));
// 5. 注册监听回调
getBE().mHwc->registerCallback(this, getBE().mComposerSequenceId);
// 将默认的 GLContext 绑定为当前线程的 EGL 上下文
getDefaultDisplayDeviceLocked()->makeCurrent();
......
// 6. 创建 EventControlThread 用来开关 vsync 信号
mEventControlThread = std::make_unique<impl::EventControlThread>(
[this](bool enabled) { setVsyncEnabled(HWC_DISPLAY_PRIMARY, enabled); });
......
// 5. 初始化显示设备
initializeDisplays();
......
// 6. 创建 StartPropertySetThread 线程
if (getHwComposer().hasCapability(
HWC2::Capability::PresentFenceIsNotReliable)) {
mStartPropertySetThread = new StartPropertySetThread(false);
} else {
mStartPropertySetThread = new StartPropertySetThread(true);
}
// 启动 BootAnimation 进程执行开机启动动画
if (mStartPropertySetThread->Start() != NO_ERROR) {
......
}
}
上述代码即为 SurfaceFlinger 初始化操作的大体流程, 其重点步骤如下
- 创建 APP 的 Vsync 信号处理线程 mEventThread-app
- 负责接收 sw-Vsync 并且发送信号给 App 进程的 Choreographer 执行 View 的绘制
- 创建 SurfaceFlinger 的 Vysnc 信号处理线程 mSFEventThread-sf
- 负责接收 sw-Vsync 并且发送给 SurfaceFlinger 触发图层的合成
- 绑定 mSFEventThread
- 初始化 HWComposer
- 注册 HWComposer 的回调
- 创建 EventControlThread 用来开关 Vsync 信号
- 初始化显示设备
- 创建 StartPropertySetThread 线程
- 启动 BootAnimation 进程执行开机启动动画
这里可以看到 SurfaceFlinger 初始化的过程创建了很多的线程, 其中 EventThread 非常重要, 它是 sw-Vsync 的分发者, 我们先看看 EventThread 的创建过程
一) EventThread 的创建
// frameworks/native/services/surfaceflinger/EventThread.cpp
EventThread::EventThread(VSyncSource* src, ResyncWithRateLimitCallback resyncWithRateLimitCallback,
InterceptVSyncsCallback interceptVSyncsCallback, const char* threadName)
: mVSyncSource(src),
mResyncWithRateLimitCallback(resyncWithRateLimitCallback),
mInterceptVSyncsCallback(interceptVSyncsCallback) {
for (auto& event : mVSyncEvent) {
event.header.type = DisplayEventReceiver::DISPLAY_EVENT_VSYNC;
event.header.id = 0;
event.header.timestamp = 0;
event.vsync.count = 0;
}
// 创建了一个线程, 其执行函数为 EventThread
mThread = std::thread(&EventThread::threadMain, this);
pthread_setname_np(mThread.native_handle(), threadName);
pid_t tid = pthread_gettid_np(mThread.native_handle());
.......
}
可以看到 EventThread 内部创建了一个线程, 这个线程会执行 threadMain 函数, 它的定义如下
// frameworks/native/services/surfaceflinger/EventThread.cpp
void EventThread::threadMain() NO_THREAD_SAFETY_ANALYSIS {
std::unique_lock<std::mutex> lock(mMutex);
while (mKeepRunning) {
DisplayEventReceiver::Event event;
Vector<sp<EventThread::Connection> > signalConnections;
// 查找事件, 并找寻能够响应事件的连接
signalConnections = waitForEventLocked(&lock, &event);
// 分发事件给监听者
const size_t count = signalConnections.size();
for (size_t i = 0; i < count; i++) {
const sp<Connection>& conn(signalConnections[i]);
// 分发给事件的监听者
status_t err = conn->postEvent(event);
// 处理异常情况
if (err == -EAGAIN || err == -EWOULDBLOCK) {
......// 抛弃事件
} else if (err < 0) {
// 出现致命错误, 清理这个连接
removeDisplayEventConnectionLocked(signalConnections[i]);
}
}
}
}
threadMain 中是一个 while 循环, 其内部的主要工作如下
- 查找并找寻能够响应事件的连接
- 调用 EventThread 连接者的 postEvent 函数处理事件
1. 查找响应事件连接
// frameworks/native/services/surfaceflinger/EventThread.h
// 描述 VSync 事件数组
DisplayEventReceiver::Event mVSyncEvent[DisplayDevice::NUM_BUILTIN_DISPLAY_TYPES] GUARDED_BY(
mMutex);
// 描述 Pending 事件集合
Vector<DisplayEventReceiver::Event> mPendingEvents GUARDED_BY(mMutex);
// frameworks/native/services/surfaceflinger/EventThread.cpp
Vector<sp<EventThread::Connection> > EventThread::waitForEventLocked(
std::unique_lock<std::mutex>* lock, DisplayEventReceiver::Event* event) {
Vector<sp<EventThread::Connection> > signalConnections;
while (signalConnections.isEmpty() && mKeepRunning) {
bool eventPending = false;
bool waitForVSync = false;
size_t vsyncCount = 0;
nsecs_t timestamp = 0;
// 1. 获取 VSyncEvent 事件
for (int32_t i = 0; i < DisplayDevice::NUM_BUILTIN_DISPLAY_TYPES; i++) {
timestamp = mVSyncEvent[i].header.timestamp;
if (timestamp) {
// 说明找到了一条 VSync 事件, 执行事件的分发
if (mInterceptVSyncsCallback) {
// 让拦截器处理
mInterceptVSyncsCallback(timestamp);
}
// 保存到 event 中
*event = mVSyncEvent[i];
mVSyncEvent[i].header.timestamp = 0;
// 记录事件的数量
vsyncCount = mVSyncEvent[i].vsync.count;
break;
}
}
// 2. 没有 Vsync 事件, 尝试获取 Pending 事件
if (!timestamp) {
eventPending = !mPendingEvents.isEmpty();
if (eventPending) {
// we have some other event to dispatch
*event = mPendingEvents[0];
mPendingEvents.removeAt(0);
}
}
// 3. 查找能够接收事件的 Connection
size_t count = mDisplayEventConnections.size();
for (size_t i = 0; i < count;) {
// 获取一个 Connection
sp<Connection> connection(mDisplayEventConnections[i].promote());
if (connection != nullptr) {
bool added = false;
// 3.1 找寻能够接收 Vsync 事件的 Connection
if (connection->count >= 0) {
// we need vsync events because at least
// one connection is waiting for it
waitForVSync = true;
// 说明存在 Vsync 事件
if (timestamp) {
// 若为未触发的一次性事件
if (connection->count == 0) {
connection->count = -1;// 不允许再次接收事件了
signalConnections.add(connection);
added = true;
}
// 若为连续事件
else if (connection->count == 1 ||
(vsyncCount % connection->count) == 0) {
// continuous event, and time to report it
signalConnections.add(connection);
added = true;
}
}
}
// 3.2 处理只存在 Pending 事件的情况
if (eventPending && !timestamp && !added) {
signalConnections.add(connection);
}
++i;
} else {
// 移除异常的 connection
mDisplayEventConnections.removeAt(i);
--count;
}
}
// Here we figure out if we need to enable or disable vsyncs
if (timestamp && !waitForVSync) {
// 没有 Connection, 则调用 enableVSyncLocked
disableVSyncLocked();
} else if (!timestamp && waitForVSync) {
// 至少有一个连接在等待 Vsync 信号, 因此调用 enableVSyncLocked 函数
enableVSyncLocked();
}
// 4. 陷入等待
if (!timestamp && !eventPending) {
// 4.1 若存在 Connection 则等待 Vsync 信号输入
if (waitForVSync) {
bool softwareSync = mUseSoftwareVSync;
auto timeout = softwareSync ? 16ms : 1000ms;
// 陷入等待
if (mCondition.wait_for(*lock, timeout) == std::cv_status::timeout) {
......
mVSyncEvent[0].header.type = DisplayEventReceiver::DISPLAY_EVENT_VSYNC;
mVSyncEvent[0].header.id = DisplayDevice::DISPLAY_PRIMARY;
mVSyncEvent[0].header.timestamp = systemTime(SYSTEM_TIME_MONOTONIC);
mVSyncEvent[0].vsync.count++;
}
}
// 4.2 若无 Connection, 则陷入无超时机制的阻塞
else {
mCondition.wait(*lock);
}
}
}
return signalConnections;
}
找寻响应事件的 Connection 的流程如下所示
- 获取 VSync 事件
- 没有 VSync 事件, 尝试获取 Pending 事件
- 查找能够响应事件的 Connection
- 若无事件, 则陷入等待
接下来看看 Connection 的 postEvent 是如何处理事件的
2. 事件的处理
// frameworks/native/services/surfaceflinger/EventThread.cpp
status_t EventThread::Connection::postEvent(const DisplayEventReceiver::Event& event) {
// 调用了 sendEvents 发送事件
ssize_t size = DisplayEventReceiver::sendEvents(&mChannel, &event, 1);
return size < 0 ? status_t(size) : status_t(NO_ERROR);
}
// frameworks/native/libs/gui/DisplayEventReceiver.cpp
ssize_t DisplayEventReceiver::sendEvents(gui::BitTube* dataChannel,
Event const* events, size_t count)
{
// 将事件发送到 BitTube 中
return gui::BitTube::sendObjects(dataChannel, events, count);
}
好的, 可以看到 Connection 的最终会将 Vsync 事件发送到 BitTube 中去, 这到底是何用意呢?
我们带着疑问继续往下探究
二) MessageQueue.setEventThread
void MessageQueue::setEventThread(android::EventThread* eventThread) {
if (mEventThread == eventThread) {
return;
}
......
// 保存到成员变量
mEventThread = eventThread;
// 1. 创建与 EventThread 的连接 Connection
mEvents = eventThread->createEventConnection();
// 2. 获取 Connection 内部的 BitTube 对象
mEvents->stealReceiveChannel(&mEventTube);
// 3. 使用 Looper 监听 BitTube,一旦有数据到来则调用 cb_eventReceiver
mLooper->addFd(mEventTube.getFd(), 0, Looper::EVENT_INPUT, MessageQueue::cb_eventReceiver,
this);
}
可以看到 MessageQueue.setEventThread 中做了非常有趣的事情
- 创建与 EventThread 的连接 Connection
- 获取 Connection 内部的 BitTube 对象
- 使用 MessageQueue 中的 mLooper 监听 BitTube,一旦有数据到来则调用 cb_eventReceiver
好的, 到这里我们就知晓之前 为什么 Connection.postEvent 仅仅是将事件发送到 BitTube 中了, 因为我们 SurfaceFlinger 的 MessageQueue 中的 Looper 会监听 BitTube 的文件名描述符, 一旦有数据写入, 则会回调 cb_eventReceiver 函数去进行处理
接下来看看 Connection 的构建流程
1. Connection 的构建
// frameworks/native/services/surfaceflinger/EventThread.cpp
EventThread::Connection::Connection(EventThread* eventThread)
: count(-1), mEventThread(eventThread), mChannel(gui::BitTube::DefaultSize) {}
sp<BnDisplayEventConnection> EventThread::createEventConnection() const {
return new Connection(const_cast<EventThread*>(this));
}
void EventThread::Connection::onFirstRef() {
mEventThread->registerDisplayEventConnection(this);
}
可以看到, Connection 创建之后会被调用 onFirstRef, 这个函数中调用了 registerDisplayEventConnection 将该 Connection 添加到了 EventThread 的缓存中
status_t EventThread::registerDisplayEventConnection(
const sp<EventThread::Connection>& connection) {
std::lock_guard<std::mutex> lock(mMutex);
// 添加一个 Connection 到连接的缓存
mDisplayEventConnections.add(connection);
// 解除 waitForEventLocked 中的阻塞
mCondition.notify_all();
return NO_ERROR;
}
在上面的分析中我们知道, EventThread.waitForEventLocked 函数, 当没有 Connection 是会陷入无超时机制的阻塞中
- 在这里可以添加了一个 Connection 之后, 调用了 notify_all, 会解除 EventThread.waitForEventLocked 阻塞
接下来看看, 当 BitTube 发生变化时, 回调的 cb_eventReceiver 函数
2. cb_eventReceiver 回调
int MessageQueue::cb_eventReceiver(int fd, int events, void* data) {
MessageQueue* queue = reinterpret_cast<MessageQueue*>(data);
return queue->eventReceiver(fd, events);
}
int MessageQueue::eventReceiver(int /*fd*/, int /*events*/) {
ssize_t n;
DisplayEventReceiver::Event buffer[8];
// 获取事件
while ((n = DisplayEventReceiver::getEvents(&mEventTube, buffer, 8)) > 0) {
for (int i = 0; i < n; i++) {
if (buffer[i].header.type == DisplayEventReceiver::DISPLAY_EVENT_VSYNC)
// 分发事件
mHandler->dispatchInvalidate();
break;
}
}
}
return 1;
}
void MessageQueue::Handler::dispatchInvalidate() {
if ((android_atomic_or(eventMaskInvalidate, &mEventMask) & eventMaskInvalidate) == 0) {
// 发送了一个 Type INVALIDATE 的消息, 最终会交由 SurfaceFlinger.onMessageReceived 处理
mQueue.mLooper->sendMessage(this, Message(MessageQueue::INVALIDATE));
}
}
MessageQueue.setEventThread 函数, 会让 Looper 监听 BitTube 的文件描述符
- 其中若有数据则回调 cb_eventReceiver 函数, 最终会交由 SurfaceFlinger 的 onMessageReceived 来处理
如此以来这个 EventThread 就可以与 SurfaceFlinger 的主线程进行数据交互了
三) HWComposer 的初始化
HWComposer 是 SurfaceFlinger 操作硬件设备的入口, 它的构造方法如下
// frameworks/native/services/surfaceflinger/DisplayHardware/HWComposer.cpp
HWComposer::HWComposer(std::unique_ptr<android::Hwc2::Composer> composer)
: mHwcDevice(std::make_unique<HWC2::Device>(std::move(composer))) {}
HWComposer 的构造函数中可以看到两个非常重要的对象
- 形参: Hwc2::Composer
- 成员变量: HWC2::Device
1. Hwc2::Composer 的实例化
// frameworks/native/services/surfaceflinger/DisplayHardware/ComposerHal.cpp
Composer::Composer(const std::string& serviceName)
: mWriter(kWriterInitialSize),
mIsUsingVrComposer(serviceName == std::string("vr"))
{
// 获取 IComposer 服务
mComposer = V2_1::IComposer::getService(serviceName);
......
// 创建客户端
mComposer->createClient(
[&](const auto& tmpError, const auto& tmpClient)
{
if (tmpError == Error::NONE) {
mClient = tmpClient;
}
});
......
}
Composer 中定义了诸多操作硬件的方法, 但是其均是有 IComposer 代理实现
2. HWC2::Device 的实例化
// frameworks/native/services/surfaceflinger/DisplayHardware/HWC2.cpp
Device::Device(std::unique_ptr<android::Hwc2::Composer> composer) : mComposer(std::move(composer)) {
loadCapabilities();
}
void Device::loadCapabilities()
{
.....
// 调用了 mComposer 的 getCapabilities
auto capabilities = mComposer->getCapabilities();
// 添加到 mCapabilities 集合中
for (auto capability : capabilities) {
mCapabilities.emplace(static_cast<Capability>(capability));
}
}
3. 回调的注册
// frameworks/native/services/surfaceflinger/DisplayHardware/HWComposer.cpp
void HWComposer::registerCallback(HWC2::ComposerCallback* callback,
int32_t sequenceId) {
mHwcDevice->registerCallback(callback, sequenceId);
}
// frameworks/native/services/surfaceflinger/DisplayHardware/HWC2.cpp
void Device::registerCallback(ComposerCallback* callback, int32_t sequenceId) {
......
mRegisteredCallback = true;
// 将参数包裹成 ComposerCallbackBridge 对象
sp<ComposerCallbackBridge> callbackBridge(
new ComposerCallbackBridge(callback, sequenceId));
// 调用了 mComposer 的注册函数
mComposer->registerCallback(callbackBridge);
}
好的, 可以看到在回调注册的过程中, 首先将传入的形参包裹成 ComposerCallbackBridge, 然后再调用 Composer 的注册方法, 接下来我们一一查看
class ComposerCallbackBridge : public Hwc2::IComposerCallback {
public:
ComposerCallbackBridge(ComposerCallback* callback, int32_t sequenceId)
: mCallback(callback), mSequenceId(sequenceId) {}
Return<void> onHotplug(Hwc2::Display display,
IComposerCallback::Connection conn) override
{
HWC2::Connection connection = static_cast<HWC2::Connection>(conn);
mCallback->onHotplugReceived(mSequenceId, display, connection);
return Void();
}
Return<void> onRefresh(Hwc2::Display display) override
{
mCallback->onRefreshReceived(mSequenceId, display);
return Void();
}
Return<void> onVsync(Hwc2::Display display, int64_t timestamp) override
{
mCallback->onVsyncReceived(mSequenceId, display, timestamp);
return Void();
}
private:
ComposerCallback* mCallback;
int32_t mSequenceId;
};
ComposerCallbackBridge 可以视为 ComposerCallback 的代理实现, 其内部定义了函数
- onHotplug
- onRefresh
- onVsync
从这里可以看出硬件驱动接受到的信号后, 最终会通过 ComposerCallbackBridge 回调到 mCallback 中, 而 mCallback 的实现即为 SurfaceFlinger
也就是说最终的硬件信号会汇总到 SurfaceFlinger 中处理
四) 初始化显示设备
// frameworks/native/services/surfaceflinger/DisplayHardware/HWComposer.cpp
void SurfaceFlinger::initializeDisplays() {
class MessageScreenInitialized : public MessageBase {
SurfaceFlinger* flinger;
public:
explicit MessageScreenInitialized(SurfaceFlinger* flinger) : flinger(flinger) { }
virtual bool handler() {
// 回调 onInitializeDisplays 函数
flinger->onInitializeDisplays();
return true;
}
};
sp<MessageBase> msg = new MessageScreenInitialized(this);
postMessageAsync(msg); // we may be called from main thread, use async message
}
void SurfaceFlinger::onInitializeDisplays() {
// reset screen orientation and use primary layer stack
Vector<ComposerState> state;
Vector<DisplayState> displays;
DisplayState d;
d.what = DisplayState::eDisplayProjectionChanged |
DisplayState::eLayerStackChanged;
d.token = mBuiltinDisplays[DisplayDevice::DISPLAY_PRIMARY];
d.layerStack = 0;
d.orientation = DisplayState::eOrientationDefault;
d.frame.makeInvalid();
d.viewport.makeInvalid();
d.width = 0;
d.height = 0;
displays.add(d);
setTransactionState(state, displays, 0);
setPowerModeInternal(getDisplayDevice(d.token), HWC_POWER_MODE_NORMAL,
/*stateLockHeld*/ false);
const auto& activeConfig = getBE().mHwc->getActiveConfig(HWC_DISPLAY_PRIMARY);
const nsecs_t period = activeConfig->getVsyncPeriod();
mAnimFrameTracker.setDisplayRefreshPeriod(period);
setCompositorTimingSnapped(0, period, 0);
}
到这里 SurfaceFlinger 就初始化好了, 下面回顾一下整体的架构
五) 回顾
SurfaceFlinger 的初始化流程如下
- 创建 APP 的 Vsync 信号处理线程 EventThread-app
- 负责接收 sw-Vsync 并且发送信号给 App 进程的 Choreographer 执行 View 的绘制
- 创建 SurfaceFlinger 的 Vysnc 信号处理线程 EventThread-sf
- 负责接收 sw-Vsync 并且发送给 SurfaceFlinger 触发图层的合成
- EventThread 执行过程
- 使用 Connection 描述 Vsync 信号的处理者
- 有 Vsync 信号时, 会写入 Connection 的 BitTube
- MessageQueue 监听 EventThread-sf 线程
- 创建与 EventThread 的连接 Connection
- 获取 Connection 内部的 BitTube 对象
- 使用 mLooper 监听 BitTube,一旦有数据到来则调用 cb_eventReceiver
- 初始化 HWComposer
- onHotplugReceived: 处理热插拔信号
- onRefreshReceived: 处理刷新信号
- onVsyncReceived: 处理垂直同步信号
- 创建 EventControlThread 用来开关硬件 Vsync 信号
- 初始化显示设备
- 创建 StartPropertySetThread 线程
- 启动 BootAnimation 进程执行开机启动动画
三. SurfaceFlinger 的启动
// frameworks/native/services/surfaceflinger/SurfaceFlinger.cpp
void SurfaceFlinger::run() {
do {
waitForEvent();
} while (true);
}
void SurfaceFlinger::waitForEvent() {
mEventQueue->waitMessage();
}
好的, 可以看到 SurfaceFlinger 的 run 函数非常简单, 即不断等待 Event 回调的死循环
总结
这篇文章主要是从广义上了解 SurfaceFlinger 的启动流程, 这里做个简单的总结, Surface 的启动主要有如下几个步骤
- SurfaceFlinger 的创建
- 创建 DispSync 对象: 用于将硬件 hw-Vsync 信号转为软件 sw-Vysnc 信号
- DispSync.init 会启动 DisplaySyncThread 线程, 该线程在 sw-Vysnc 到来时唤醒并分发给监听者
- onFirstRef 创建 MessageQueue 对象
- Native 层的 MessageQueue 与 Java 的不同, 它没有真正的队列, 而是配合 Looper 进行 IO 多路复用的监听
- 创建 DispSync 对象: 用于将硬件 hw-Vsync 信号转为软件 sw-Vysnc 信号
- SurfaceFlinger 的初始化
- 创建 APP 的 Vsync 信号处理线程 EventThread-app
- 负责接收 sw-Vsync 并且发送信号给 App 进程的 Choreographer 执行 View 的绘制
- 创建 SurfaceFlinger 的 Vysnc 信号处理线程 EventThread-sf
- 负责接收 sw-Vsync 并且发送给 SurfaceFlinger 触发图层的合成
- EventThread 执行过程
- 使用 Connection 描述 Vsync 信号的处理者
- 有 Vsync 信号时, 会写入 Connection 的 BitTube
- MessageQueue 监听 EventThread-sf 线程
- 创建与 EventThread 的连接 Connection
- 获取 Connection 内部的 BitTube 对象
- 使用 mLooper 监听 BitTube,一旦有数据到来则调用 cb_eventReceiver
- 初始化 HWComposer
- onHotplugReceived: 处理热插拔信号
- onRefreshReceived: 处理刷新信号
- onVsyncReceived: 处理垂直同步信号
- 创建 EventControlThread 用来开关硬件 Vsync 信号
- 初始化显示设备
- 创建 StartPropertySetThread 线程
- 启动 BootAnimation 进程执行开机启动动画
- 创建 APP 的 Vsync 信号处理线程 EventThread-app
- SurfaceFlinger 的发布
- 将这个 Binder 本地对象发布到 ServiceManager 进程
- SurfaceFlinger 的启动
- 死循环, 等待 Looper 唤醒处理任务
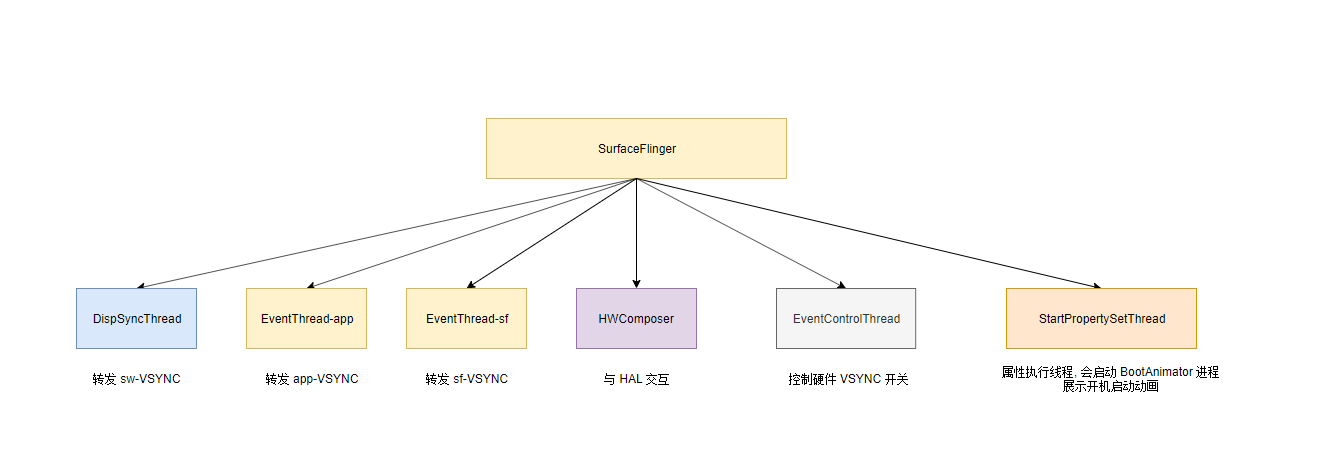
简单总结起来, SurfaceFlinger 创建了 5 个线程执行任务
- DispSyncThread: 用于将 DispSync 处理好的 SW-VSYNC 分发给监听者 DisplaySyncSource
- EventThread-app: 维护了与 App 进程的 Connection 连接, 用于接收 DispSyncThread 发送的信号, 并且发送给 App 端, 会触发 Choreographer 执行 View 的绘制流程
- EventThread-sf: 维护了与 SurfaceFlinger 的 Connection, 接收到 VSYNC 后, 会调用 cb_eventReceiver 执行图层的合成操作
- EventControlThread: 用于控制硬件 Vsync 的开关
- StartPropertySetThread: 执行属性列表, 会启动 BootAnimation 进程展示开机启动动画